Integrating an FT205 wind sensor on a fixed-wing UAV as an alternative to a pitot tube.

Background
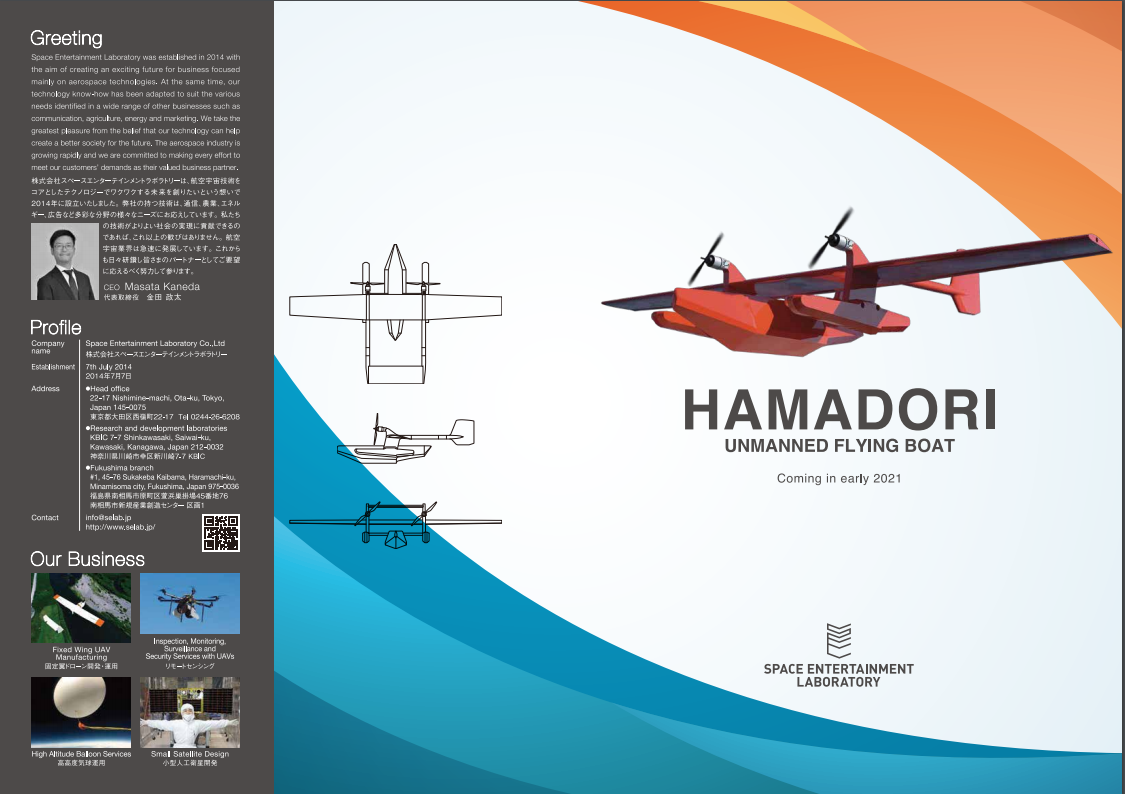
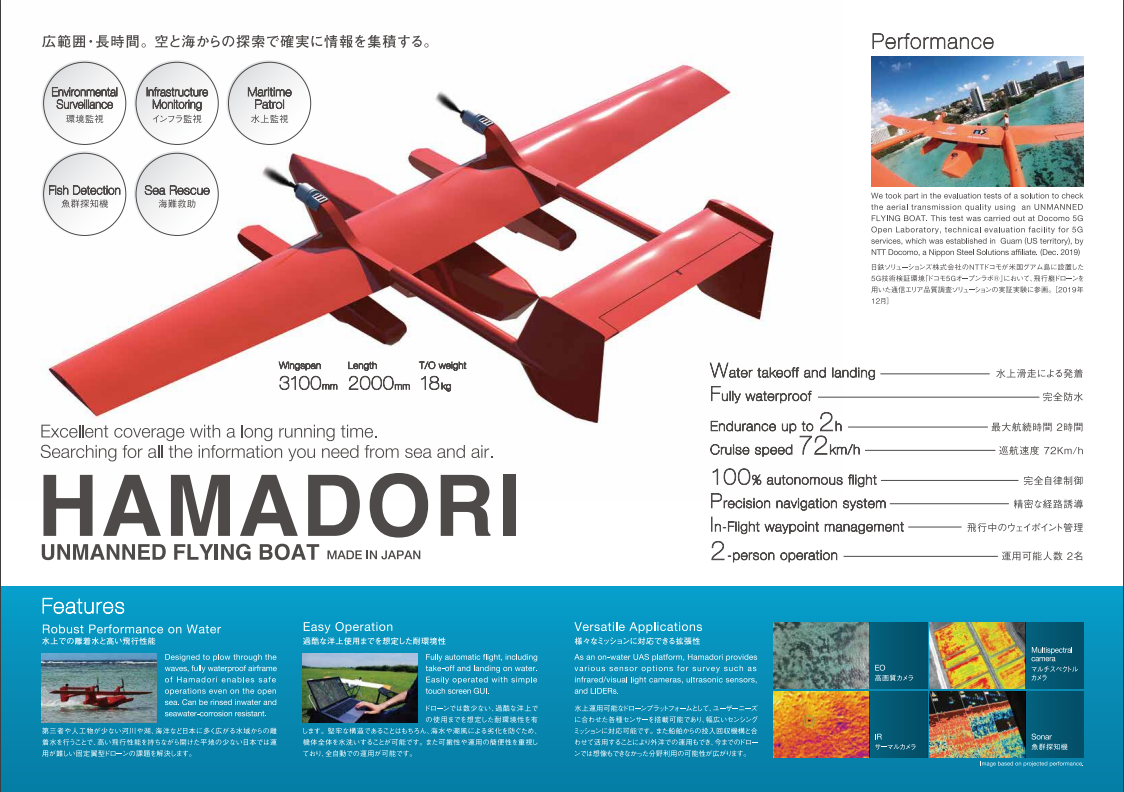
Established in 2014, Space Entertainment Laboratory (SELab) is fixed wing drone manufacturing company based in Tokyo. Their latest design, the Hamadori, is an unmanned seaplane due onto the market in early 2021. With a flight time of up to two hours, it is ideal for surveillance and monitoring services both at sea and on land.
Early trials of the Hamadori used a pitot tube to collect airspeed data to control the fixed-wing UAV effectively. However, as the Hamadori both takes off and lands on water, they found that the pitot tube was getting blocked by water and therefore causing major malfunctions. Consequently, they were looking for an alternative type of airspeed sensor that would continue to function in seawater environments.
Project
 SELab contacted FT Technologies and we provided them with an FT205 lightweight sensor for testing with their prototype. The FT205 sensor was fitted to the nose of the UAV with the datum mark, representing 0deg, facing in.
SELab contacted FT Technologies and we provided them with an FT205 lightweight sensor for testing with their prototype. The FT205 sensor was fitted to the nose of the UAV with the datum mark, representing 0deg, facing in.
SELab used a 3D printer to produce a mount for the FT205. They fitted an original cable to the sensor to communicate with the flight controller, as well as powering the sensor with electricity from the UAV’s battery. They also programmed a driver for the sensor within the flight controller.
In December 2019, the Hamadori, fitted with the FT205 sensor, flew a series of tests at the Docomo 5G Open Laboratory in Guam.
Conclusion
SELab were delighted with the successful results. The sensor worked perfectly and delivered accurate airspeed data to the flight control system throughout the tests.
“The FT205 solved our problem just as we had hoped it would. Even when the drone landed on seawater, the data was not affected. The seawater appears to have had no effect on the sensor. Also, the accuracy of the data seemed to be higher than that gathered from a pitot tube, especially at low airspeeds – under 5m/s.
“We will now be using the FT205 as we feel confident that it will show airspeed precisely and constantly in whatever condition our UAVs may encounter in normal operation.”
Takenori Hashimoto
Space Entertainment Laboratory
Further information: